Automated vehicles are used already by some ports. However, the need for a renewal of vehicles to efficiently implement an automated approach represents a high investment and current automation needs do not justify such investment at short-medium term. Therefore, LOGIMATIC proposes an ad-hoc advanced location and navigation solution to enable the automation of existing port vehicles with a significantly lower cost which will allow short-medium term investments until the whole port fleet is renewed with totally autonomous vehicles in the long term. The project will develop and demonstrate an innovative location and navigation solution for the automation of the operations of straddle carriers in container terminals.
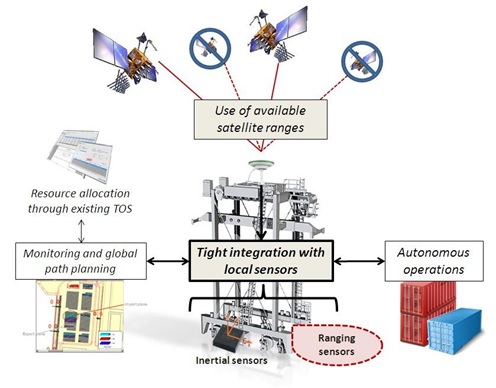
Figure. LOGIMATIC project concept
Objectives
The scientific and technological objectives of the project are:
To develop an advanced automated navigation solution based on the integration of Global Navigation Satellite Systems (GNSS) and sensors onboard the SC vehicles.
To implement a GIS-based control module compatible with existing Terminal Operating Systems (TOS) for optimized global (yard level) route planning and fleet management. The module’s objective is to offer efficient transport logistics within yard operations and compensate for the loss of local driver intelligence
To implement security mechanism in order to detect and avoid spoofing and/or jamming attack, this makes the whole system more reliable to the cyber-attack
To assess the impact of application of such automated approach at large scale through simulation
To integrate, validate and demonstrate the proposed solution in a real port yard.
Expected Impacts
The main expected impacts of LOGIMATIC project are:
Improving productivity by increasing operational efficiency
Increasing task accuracy and reducing errors
Faster cycle times
Reducing labour and operational costs
Reduce worker strain and safety incidents
Replace of relatively low skilled jobs with high-skilled supervision and remote operations jobs